Section: New Results
Head Detection Using RGB-D Camera
Participants : Marine Chabran, François Brémond.
keywords: RGB-D camera analysis, head detection, serious games
The goal of this work is to improve a head detection algorithm using RGB-D sensor (like a Kinect camera) for action recognition as part of a study of autism. The psychologists want to compare the learning process of children with autism syndrome depending on games (digital or physical toys).
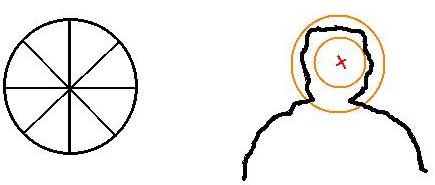
The algorithm described in [79] represents a head by its center position. It takes three steps to determine this point :
-
Determine possible head center positions using a head model : inner circle radius=6 cm, outer circle radius=20 cm (Figure 13 ).
A good inner point is a point on the inner circle verifying :
A good outer point is a point on the outer circle verifying :
-
Select final head center according to its score (calculated according to the number of good inner and outer points).
|
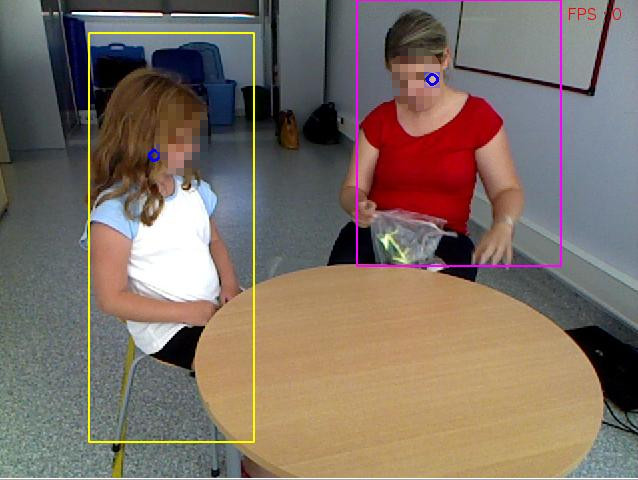
For now, it works well within video where people are close to the camera (about 1 meter) and without any background just behind them (Figure 14 ).
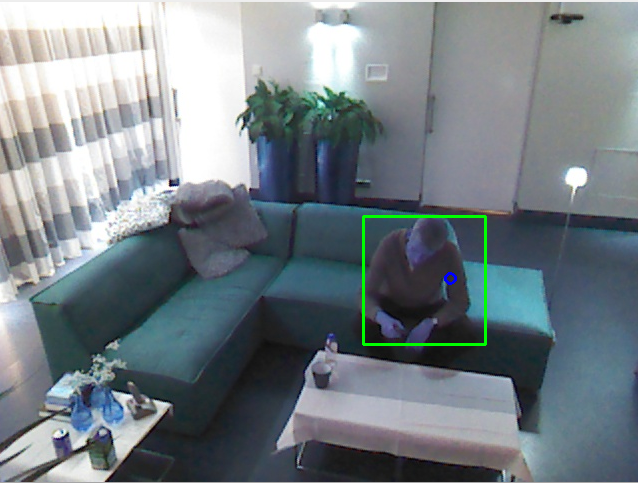
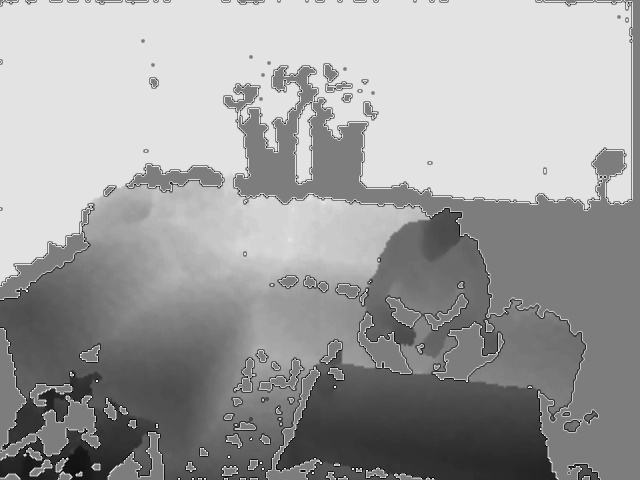
The problem is when the person is sitting and the head is ahead of the body (Figure 15 ) or close to a wall, the difference between head depth and outer circle depth becomes not sufficient (about 10 cm).
We have evaluated the performance of this algorithm with two data sets (Table 1 ). For Lenval Hospital data set, we have evaluated 2 series of 200 frames, for the Smart Home data set, we have evaluated 3 series of 300 frames (a total of 1300 heads).
| Videos | Head Detection (%) | People detection (%) |
| Lenval Hospital dataset (Figure 14 ) | 89.7 | 96.9 |
| Rest home dataset (Figure 15 ) | 62.8 | 85.3 |